

Gyroscope and Accelerometer
Components:
1- Arduino
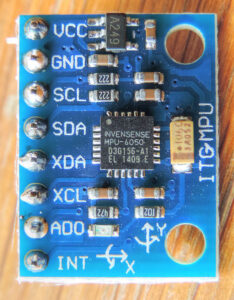
2-MPU6050 Sensor
3- Wires
Connections:
Vcc : 5v
Gnd : Gnd
SCL : A5
SDA : A4
INT : D2
Code:
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
void setup() {
Serial.begin(9600);
while (!Serial) {}
if (!mpu.begin(MPU6050_SCALE_2000DPS, MPU6050_RANGE_2G)) {
Serial.println(“Failed to initialize gyroscope sensor.”);
while (1);
}
mpu.calibrateGyro();
}
void loop() {
float angle = mpu.getAngleZ();
Serial.print(“Angle: “);
Serial.println(angle);
delay(100);
}